具身智能行业应用方案解决方案PDF
具身智能作为人工智能的重要演进方向,打破传统 AI 与物理世界脱节的局限,以物理实体 + 主动交互为核心,让智能体像生物一样适应环境、执行任务,正成为产业智能化升级的关键驱动力。
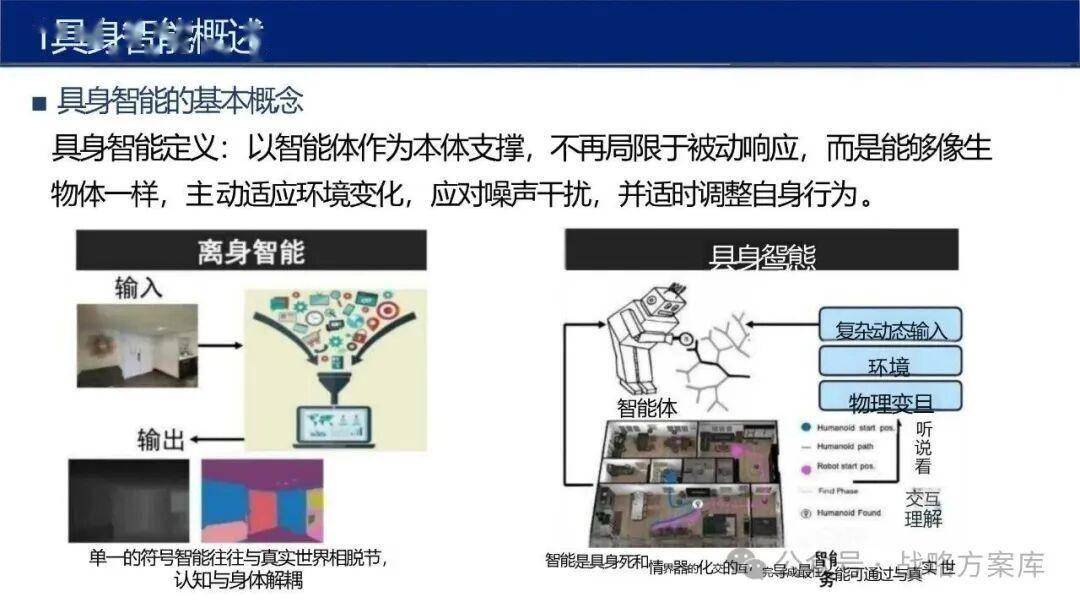
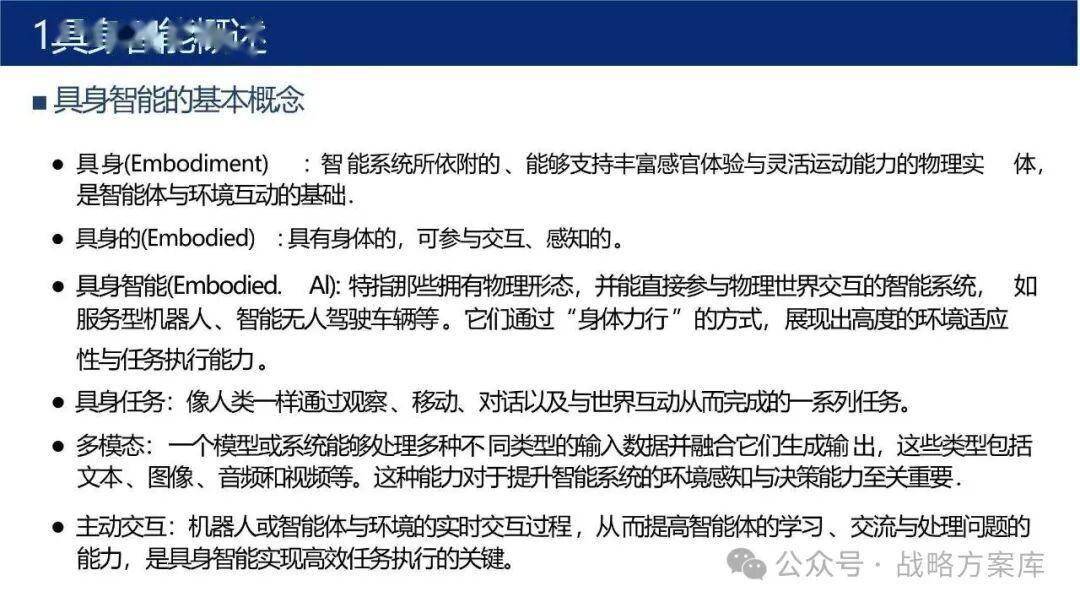
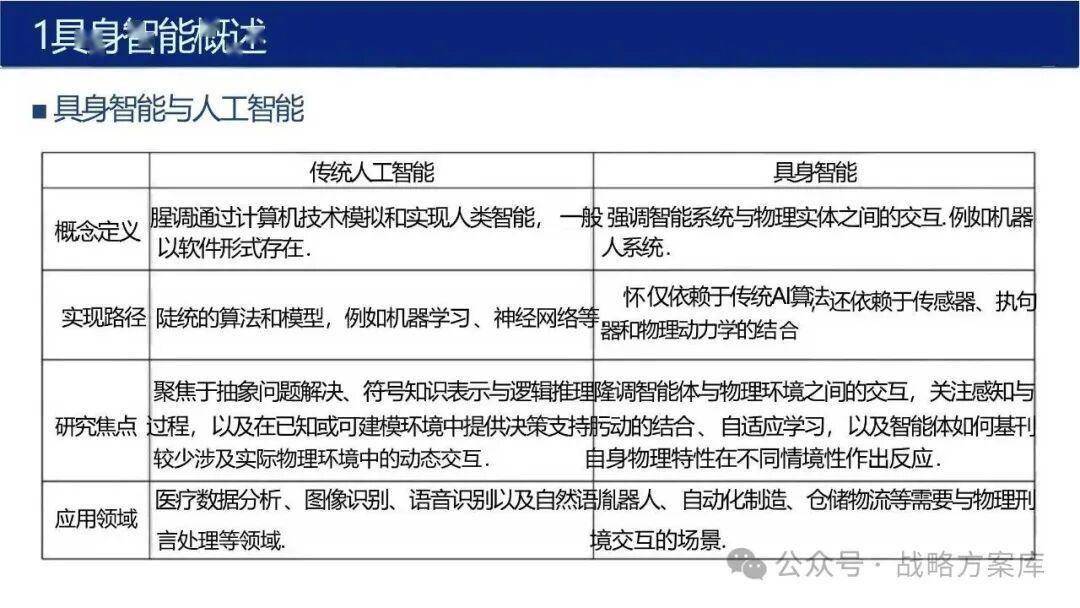
从核心定义来看,具身智能是拥有物理形态、可直接与物理世界交互的智能系统,依托智能体、本体、数据、具身学习四大要素,构建 “感知 - 决策 - 行动” 闭环。区别于传统离身智能,它强调智能与身体、环境的深度耦合,广泛应用于机器人、自动驾驶等领域。
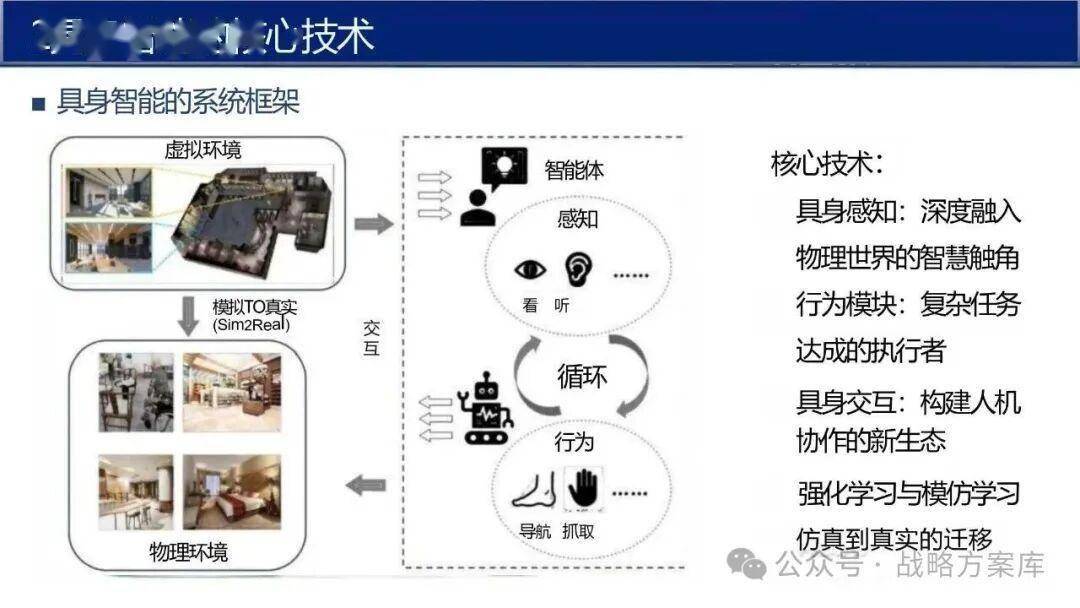
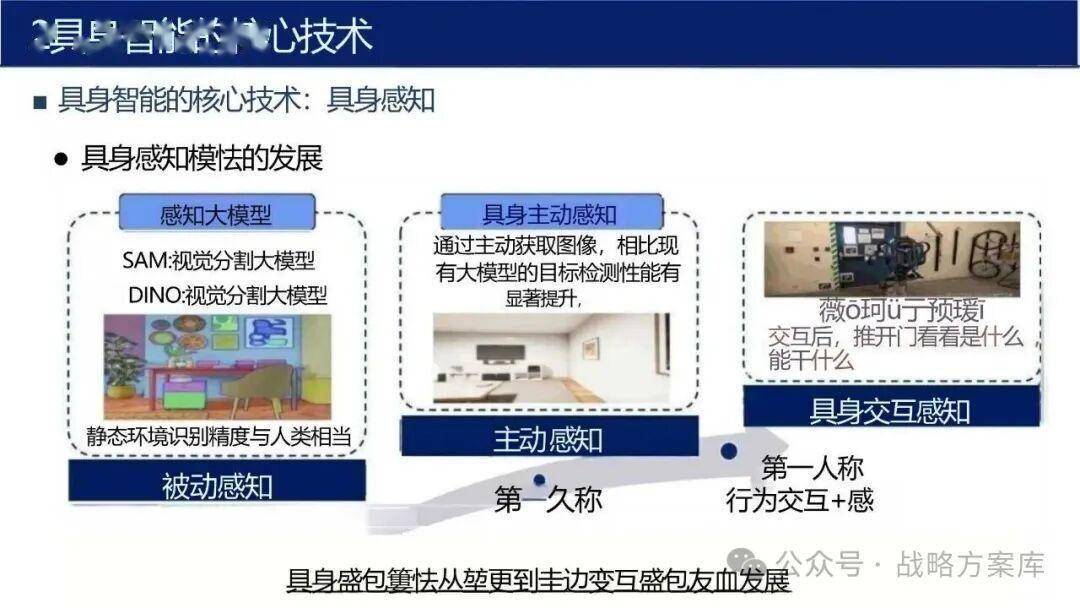
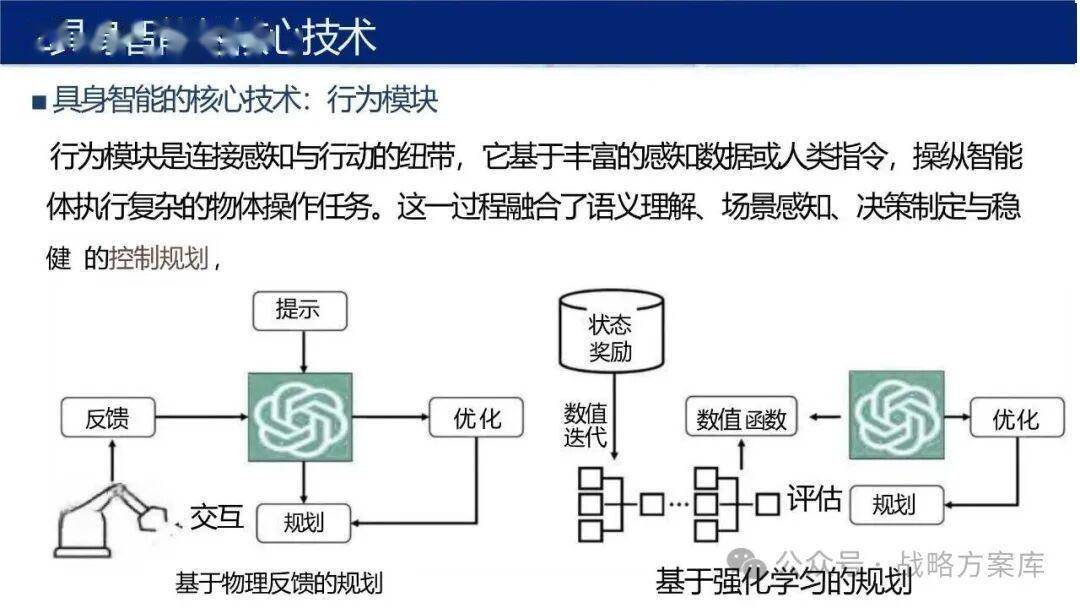
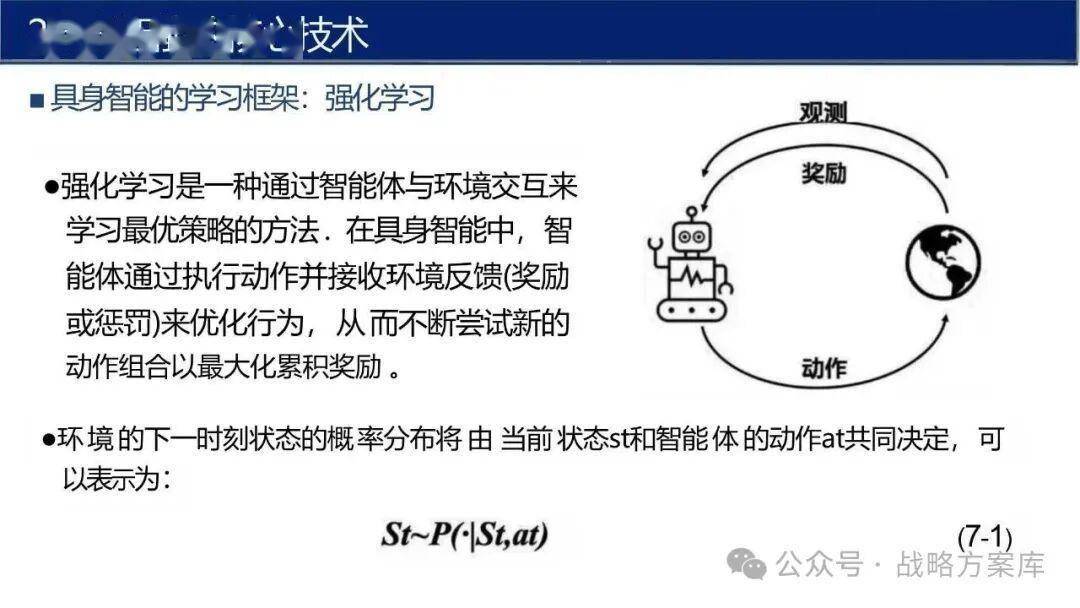
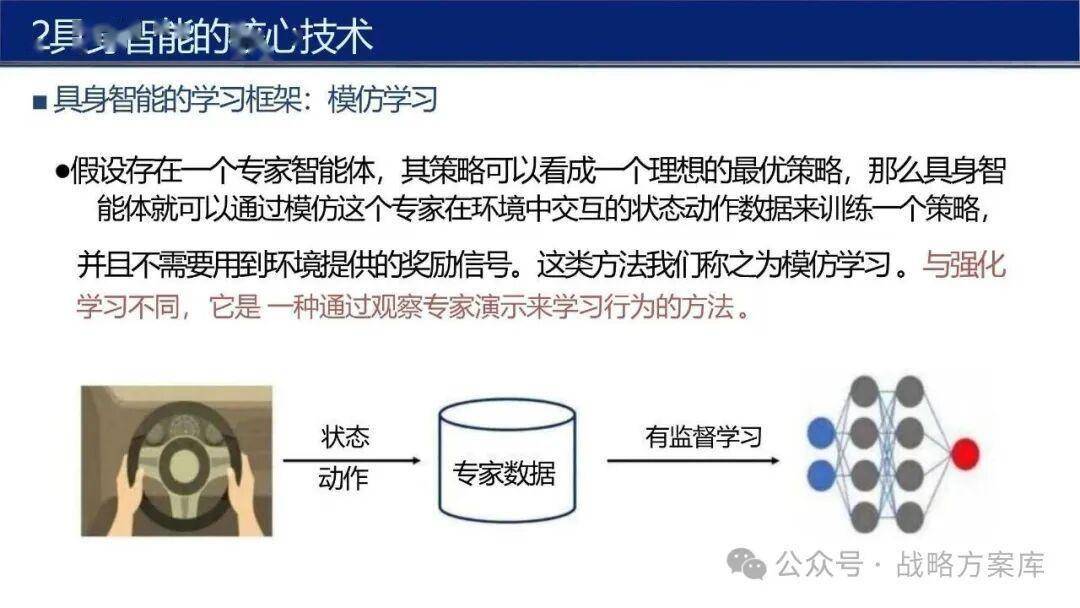
核心技术层面,具身智能围绕具身感知、行为模块、具身交互三大系统框架展开,融合主动视觉、三维定位、多模态整合等感知能力;通过强化学习、模仿学习实现智能体自主优化,借助 Sim2Real 仿真到真实迁移技术,打通虚拟训练与现实应用的壁垒。
典型应用上,具身智能已落地两大核心场景:一是智能机器人操作,以 RT-1、RT-2 等 VLA 模型为代表,实现视觉、语言与动作协同,完成抓取、操作等精准任务;二是服务机器人导航,覆盖点导航、视觉目标导航、视觉语言导航,支持复杂环境下自主路径规划。
未来,具身智能大模型将向多模态、自适应方向进化,同时需攻克非结构化环境适应、复杂任务执行、群体智能协作、数据安全伦理等挑战,持续推动 AI 从虚拟走向现实,赋能多行业智能化变革。
报告目录:
1 具身智能概述
2 具身智能的核心技术
3 具身智能的典型案例
4 具身智能的前沿与展望
#具身智能#人工智能#智能机器人#多模态#强化学习#模仿学习#Sim2Real#视觉语言导航#RT‑2#人机交互
内容预览如下(末尾下载通道):