人形机器人传感器六问六答PDF
问题一:目前人形机器人使用哪些传感器?
对 Optimus 和国内人形机器人厂商目前的传感器方案梳理来看,使用的传感器包括用于关节的一维力和一维力矩传感器、关节电机内部的位置传感器、IMU、用于腕关节和脚部的六维力传感器、触觉传感器(指尖、手掌、高碰撞风险区等)及视觉模组。
问题二:触觉传感器有哪些类型?发挥怎样的作用?
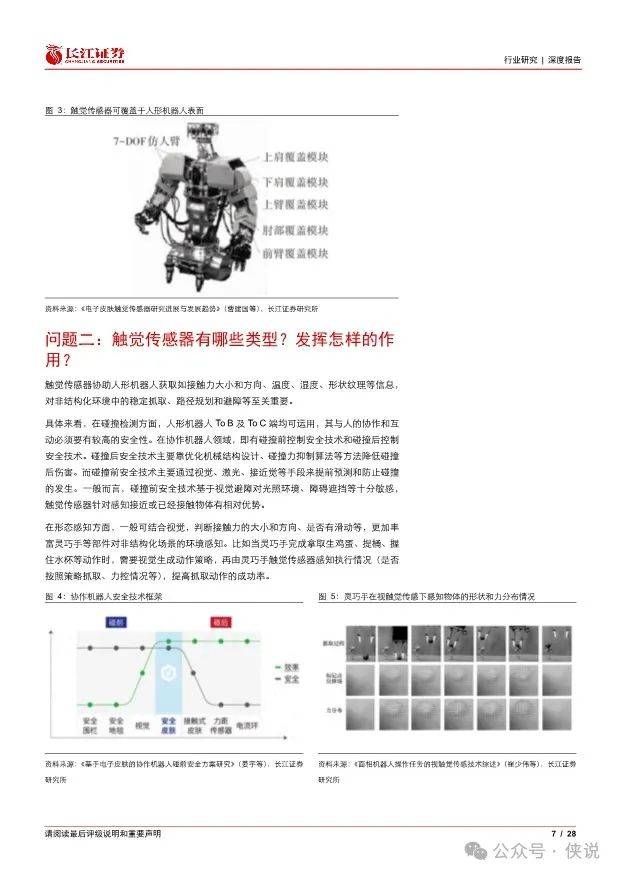
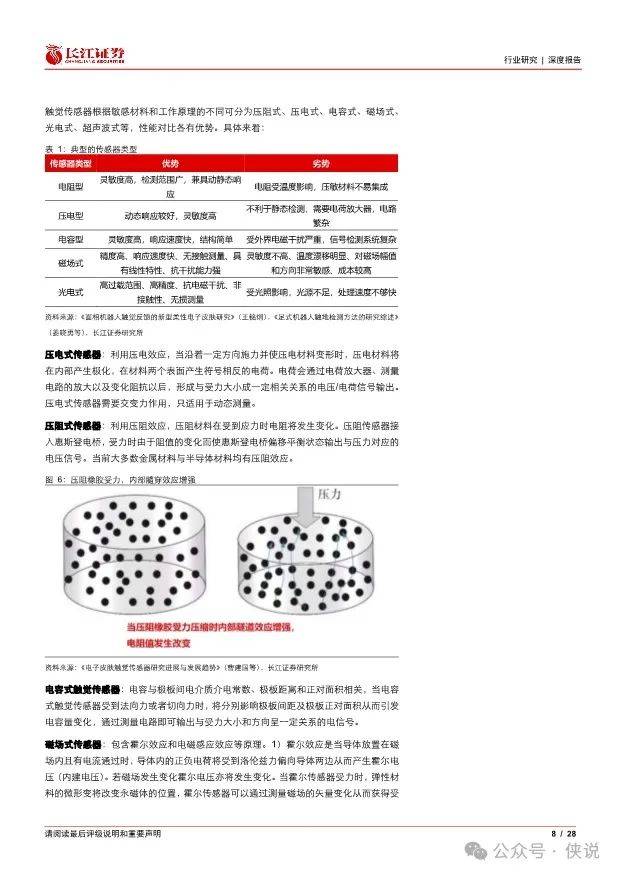
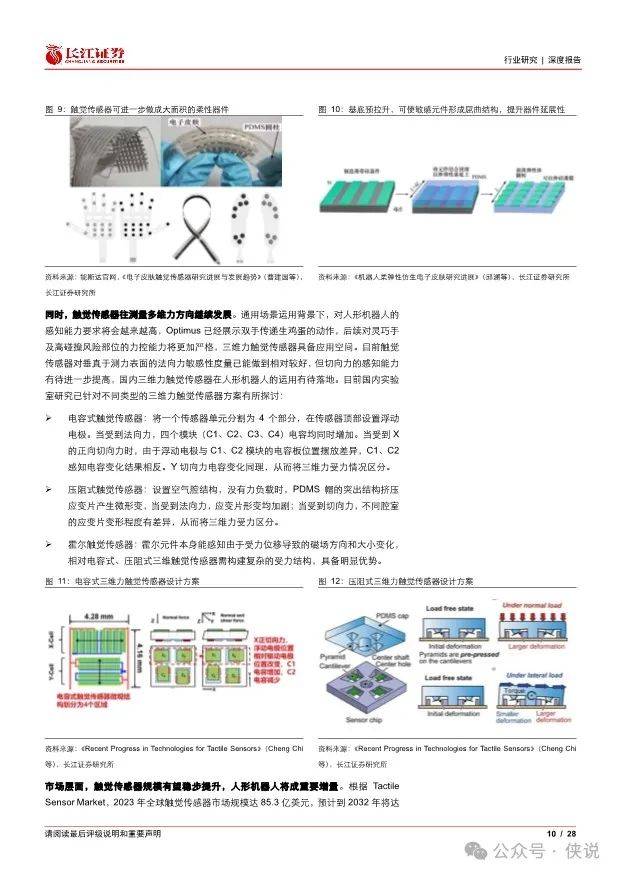
触觉传感器协助人形机器人获取如接触力大小和方向、物体温度、湿度、形状纹理等信息。根据敏感材料和工作原理的不同可分为压阻式、压电式、电容式、磁场式、光电式、超声波式等不同类型触觉传感器,性能对比各有优势。往后看,触觉传感器往大面积、柔性化运用、测量多维力方向继续优化,市场规模有望稳步提升,人形机器人将成重要增量。
问题三:IMU 在人形机器人发挥怎样的作用?
IMU 测量物体在三个正交方向的角速度和加速度,核心部件MEMS加速度计和 MEMS 陀螺仪为相对成熟产品。运用于人形机器人,IMU 可以根据XYZ方向的加速度和旋转角变化来准确估计姿态。同时IMU可以动态确定人形机器人自身位置变化,从而确定其移动轨迹及实现导航功能。从市场端看,21年全球 MEMS惯性传感器市场规模超35亿美元,且受益人形机器 人、自动驾驶、高端工业等领域渗透应用,有望实现稳定发展。IMU国产替代机遇较大。
问题四:硅基 MEMS、柔性传感器、霍尔传感器有什么区别?
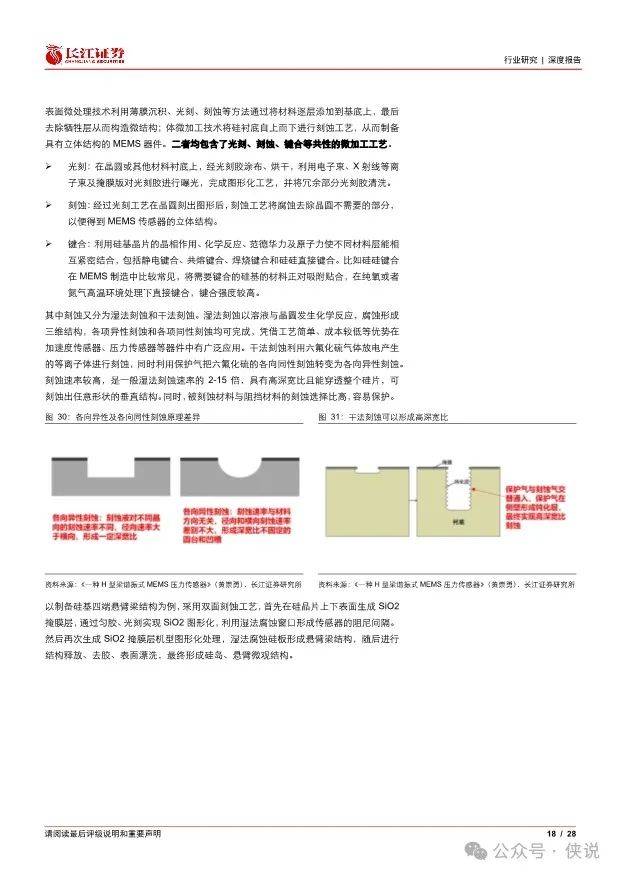
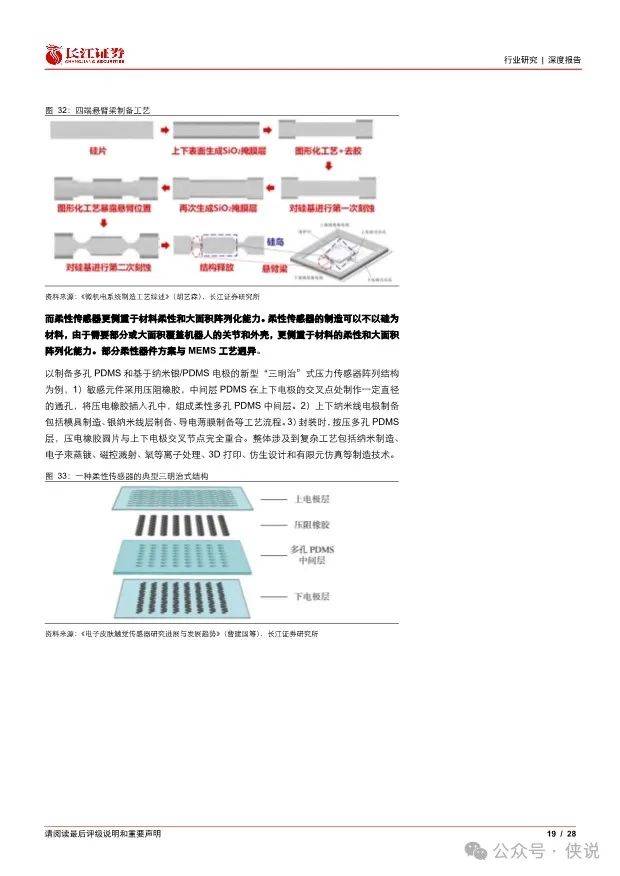
MEMS 传感器具有体积小、重量轻、功耗低等特点。其主要材料是硅,加工技术基于集成电路制造技术,形成特定的机械结构。加工工艺包括表面微处理技术、体微加工技术、光刻、电镀、 铸塑工艺等,其中表面微处理技术、体微加工技术相对成熟,加上后道的 MEMS 模块封装, 可实现MEMS传感器批量量产。而柔性传感器的制造可以不以硅为材料,由于需要部分或大面积覆盖机器人的关节和外壳,更侧重于材料的柔性和大面积阵列化能力。部分柔性器件方案与 MEMS 工艺迥异。霍尔传感器基于MEMS工艺,以磁场作为感应介质,除了直流无刷电机 (磁编码器)和测磁仪表的成熟运用,此外在无损探伤、位移传感、压力传感等领域亦有运用。
问题五:如何看待六维力传感器的原理、作用、价值量及格局?
六维力传感器主要测量物体在空间中所受力及力矩,技术壁垒明显,单台人形机器人一般可配置 4 个六维力传感器。目前国内市场基数偏小,是高成长性赛道,后续高增催化包括应用渗透、 国内厂商产品矩阵完善、产品降本及国产化率提升等。六维力传感器在人形机器人运用有望成为标配,测算当人形机器人产量达到 1 万台、10 万台、100 万台、200 万台时,六维力传感器需求空间将达到 5 亿、10 亿、50 亿、80 亿,弹性明显。国产化率有待提升,已有国内企业在部分细分赛道占据较大份额,表现出较强的差异化竞争实力,有望享受国产替代红利。
问题六:当前国内哪些上市企业具备传感器布局?
国内上市企业针对各类型传感器均有布局,应用场景百花齐放,有望受益应用渗透及国产替代机遇,六维力传感器赛道,国产替代方兴未艾,国内产品验证稳步推进,重点推荐东华测试。IMU、触觉传感器等细分赛道潜在空间广阔,亦有国产替代红利。
本报告内容节选如下: